
The technology of computing coordinates in quasi-real-time based on the post-processing data was developed in 2020 by the founder of JAVAD GNSS, Dr. Javad Ashjaee. It is called Real-Time Post-processed Kinematic (RTPK). In 2021, the RTPK technology is patent-pending in the USA.
RTPK main features:
- data obtained in RTK mode is used;
- post-processing is performed by the GNSS receiver;
- a self-verified fixed solution is produced.
Post-processing with RTPK requires satellite measurements at the base station, transmitted in RTCM 3 format, and saved in a rover file. All JAVAD GNSS receivers provide such an opportunity.
The calculations are performed on a RISC-architecture processor, which simultaneously processes satellite signals, maintains communication with the base station, and operates in RTK mode.
The processing algorithm is similar to the JAVAD Internet service DPOS engine, which is well proven in the United States over the last 7 years of operation. The DPOS service processes over 100,000 requests per month.
The new RTPK method has already received well-deserved recognition from hundreds of American surveyors who have been using it in the field. One such review can be found on the JAVAD GNSS users forum http://support.javad.com (Fig. 1).
The main problem with RTK is verification of fixed solutions. New global navigation satellite systems have been developed as a method to overcome this problem. The main criterion for searching for integer values of phase ambiguities is contrast - the ratio of the sums of the squared residuals of the two best integer variants. Not long ago, when only GPS and GLONASS signals were available, the sequential enumeration of integer values quickly led either to a preset empirical contrast value or to complete exhaustion of possible sets of integer values. The situation substantially changed with the appearance of new GNSS constellations such as Galileo, Beidou, QZSS. With the simultaneous observation of a large number of satellites transmitting signals in three bands, the probability of random selection of invalid data has critically increased, which, nevertheless, satisfies the criteria for a fixed solution.
In practice, RTK has shown that single measurements do not guarantee reliability of the solution. Coordinate calculations can be accurately estimated only when phase measurement ambiguities are correctly initialized. However, the root-mean-square error or the geometric factor (PDOP) criteria are not intended for checking the reliability of fixing ambiguities.
In most cases, the surveyor is forced to measure the same point repeatedly, often introducing modifications such as changing the antenna height or observing additional control points with offsets via a tape-measure. Of course, this increases the time spent on each survey point.
What other solutions can GNSS equipment manufacturers provide? One of the most popular options is to process the GNSS signals individually and in random combinations. The independent solutions are compared according to the values of the coordinates for convergence, which is established based on the accuracy estimate. When the tolerances are satisfied, the solution is calculated as a weighted average. This multi-threaded approach reduces the computational load, making it possible to execute on less energy-intensive processors. At the same time, the validity of the solution increases.
Processing the data separately has significant disadvantages. First, it is unclear what criteria should be used to combine GNSS signals: GPS + GLONASS, Galileo + Beidou, etc. The relevance of combinations may change significantly due to the continuous development of GNSS. Secondly, an even more important disadvantage is weakening of the so-called “floating solution” due to degradation of the geometric factor. The fixed solution is calculated based on the floating one, which includes both coordinates and ambiguities. However, the coordinates are not the goal of the floating solution. Rather, it is the covariance matrix and the float ambiguities. Still, since there is a correlation of the parameters, the possibilities of searching procedure will also depend on the accuracy of the preliminary coordinates. The specified coordinate accuracy, in turn, depends on the number of satellites used in a particular solution and the geometry of their location in the sky. In other words, from the geometric factor (PDOP).
As is known, the RTK algorithms are based on straightforward data filtering. Each new measurement epoch can be the basis for the initialization of phase measurements or coordinates refinement. The criterion for obtaining a fixed solution is based primarily on the contrast value, which is calculated over a limited time frame. Thanks to this approach, RTK algorithm can initialize phase measurements during short periods of good data, keep that fixed solution, and then refine it with each new epoch even in case of worse signals. Traditionally, post-processing has not taken this approach. Analysis of the complete observation session dataset performed in unfavorable conditions requires a significant number of iterations to filter out unreliable measurements, which may require an unacceptable amount of time. Therefore, post-processing is often ineffective, even with long observation sessions, and RTK has been the preferred method for challenging environments.
The filtering algorithms have many empirical parameters, which are processing settings - the weights of the code and phase measurements, the time factor for reducing the weight of past epochs, the estimation of the random noise of the system, the blinding of signals by the elevation and azimuth, etc. By adjusting these parameters, the same RTK engine can achieve significantly better results in post-processing than in real-time.
RTPK takes advantage of both post-processing and RTK. The bidirectional filtering algorithm provides additional opportunities for initializing phase measurements, i.e., obtaining the so-called fixed solution and increases the number of epochs used to calculate coordinates.
All available GNSS signals are processed together to maximize PDOP.
With RTPK, there is no need to make repeated observations at the same point. Filtering parameters are evaluated based on a preliminary test of statistical hypotheses performed on a full series of observations. Verification of the integer solution is performed inside the original searching algorithm by comparing the partial solutions at the stage of processing the covariance matrix. The accuracy of the computed coordinates will be better than using the RTK method.
The post-processing time for various JAVAD GNSS receivers is approximately 1/20–1/60 of the observation time. The recommended observation time in a full canopy under trees is 6 minutes. Generally, 1-10 seconds is sufficient in open environments. Thus, it will be true that RTPK is a quasi-RTK method since data processing, in most cases, takes about one second.
If the radio signal transmitting corrections is lost, it is possible to download the file of measurements obtained at the base station to the rover receiver and get a solution directly in the field. This can be very helpful in many cases.
The use of a full antenna calibration table, which considers the dependence on the satellite ascent angle and the azimuth, significantly increases the accuracy of calculating the vertical component of the solution. The usual discrepancy between solutions at distances up to 15 km under normal conditions is 1–3 mm in all three coordinates.

During this test, a TRIUMPH-LS was positioned against the brick wall of a house lined with old trees (Fig. 2). Due to the strong multipath, the observation conditions in such a location is worse than even directly under the canopy of trees. This receiver tracked signals from GPS, GLONASS, Galileo, Beidou, and QZSS. RTK and RTPK shots were recorded automatically every 2 minutes.
The comparison of statistics shows that RTK (Fig. 3) yielded 45 true fixed solutions and RTPK (Fig. 4) yielded 93 true fixed solutions.

The TRIUMPH-LS can automatically compare both solutions and, if they coincide, record the result (Fig. 5). The tests have shown that this approach provides high reliability of the fixed solution (over 99.99%).

Advanced modeling of the troposphere effect, available in engines running in unlimited time processing mode, allows reliable positioning at large distances from the base station. In contrast, conventional RTK is not recommended for distances longer than 40 km from the base station.
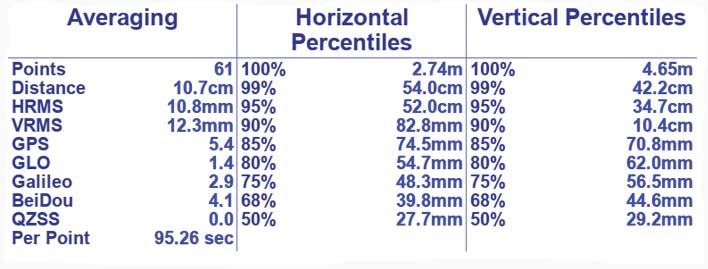
Figure 6 shows the statistics of RTPK processing of 25, 36, and 56 km baselines for the single epoch only. The satellites used are GPS, GLONASS, Galileo, Beidou, and QZSS. The full observation sessions took 4 hours and 14,401 calculations were performed.

RTPK is a feature available now in JAVAD GNSS receivers. Please contact us at sales@javad.com for more information.