Our default is 5 mG.
Our default is 5 degrees.
Our default is 5 cm.
RTK corrections as well as motion values will be transmitted to the rover.
Maximum values of the motion parameters will be kept at all time.

It is well known that having your own base station near your job site provides you with faster, more accurate, more reliable and less expensive solutions. If you don't know the accurate position of your base, our DPOS service will find it. Read details in the following pages.
After you start your base, If during your survey somehow your base is moved, all your rover points will be inaccurate to the amount of the base movement. But...
...But Don’t Worry, Be Happy:
We will let you know instantly during your survey if your base has moved. We use:
|
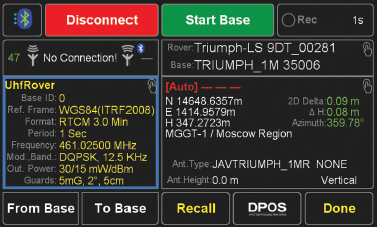
To setup for base movement alert, go to base rover setup screen and click on the left side of the screen. |
|
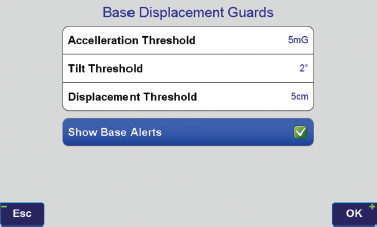
You can set up threshold limits for accelerometer, inclinometer (tilt) and displacement values to create alert when these thresholds are exceeded. |
|
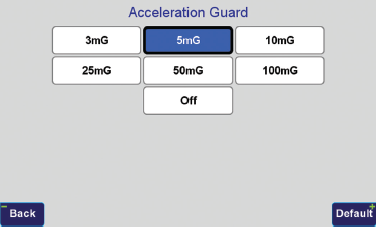
Set Acceleration limit here. The units are in milliG (mG). G is acceleration in free fall.
"Off" means ignore this sensor. Our default is 5 mG. |
|
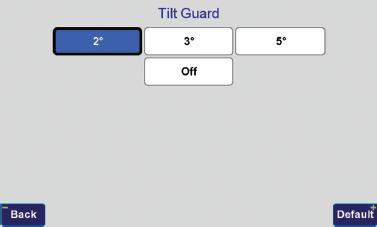
Set the tilt threshold here. Units are in degree. "Off" means ignore tilt.
Our default is 5 degrees. |
|
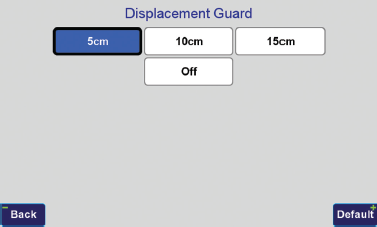
Set the displacement threshold here. "Off" means ignore displacement.
Our default is 5 cm. |
|
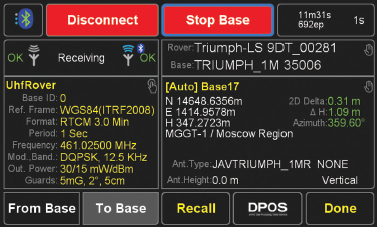
Click the "Start Base". it will change to "Stop base." RTK corrections as well as motion values will be transmitted to the rover. Maximum values of the motion parameters will be kept at all time. |
|
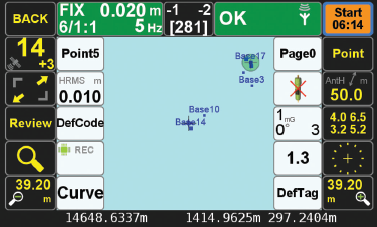
Maximum values of the three sensors can be shown in a white box in the action screen. Top left is the acceleration in milliG, bottom left is tilt and bottom right is displacement in centimeter. |
|
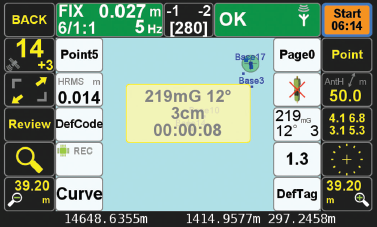
If any of the threshold values exceeds, a pop up will alert you and shows the maximum value of the sensors since you started the base. The bottom number is time since the threshold(s) exceeded. |